


Machine Learning algorithms for ADAS & self-driving cars
One of the primary goals of both Advanced Driver Assistance Systems (ADAS) and Autonomous Vehicles (AV) is to increase road safety for all road users. In order for autonomous vehicles to be trusted to drive us around they will need to be developed to the point that they are safer on the road than human drivers – while a certain amount of error is expected of human drivers the same will not be tolerated for autonomous vehicles.
In addition to AVs needing to be better than humans in typical driving conditions, they will also need to be able to adapt to new and unexpected situations. It is not possible for developers to imagine every possible scenario a self-driving vehicle will encounter on the road. For this reason, AVs need to be capable of learning so they can react to the ever-changing world around them.
To solve this problem, we turn to machine learning algorithms. These allow computers to continue to improve outside of their training data. Machine learning can occur through supervised or unsupervised learning.
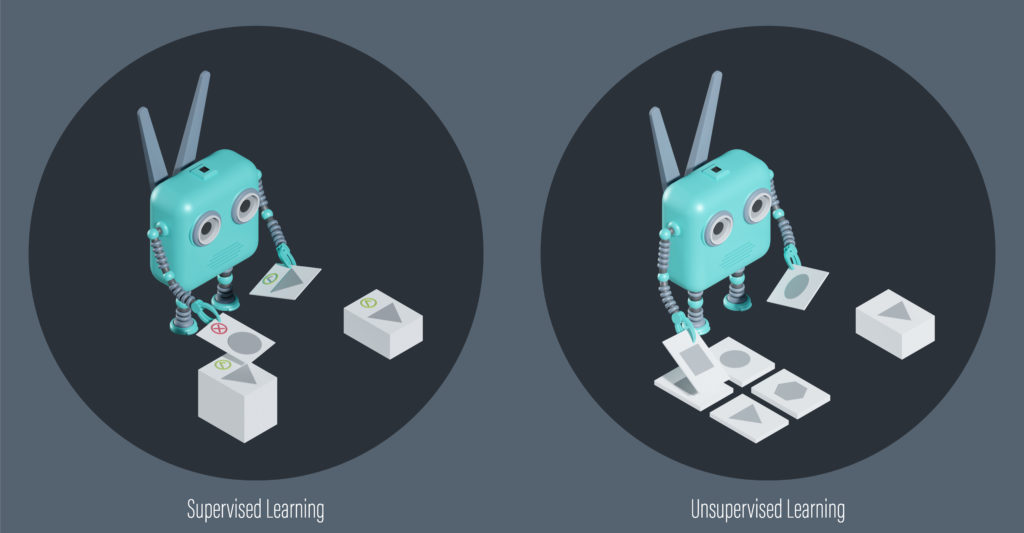
Supervised learning has a computer make predictions based on input data and then compares these predictions with correct output data, in order to improve predictions in the future.
Unsupervised learning uses data with no data labelling so no correct output data exists. The computer learns to recognised patterns and groups data in meaningful ways in order to learn.
As safety for both passengers and other road users is dependent on autonomous vehicles making the correct decisions, supervised learning is preferred when available as this provides a higher level of accuracy. The cost of an incorrect decision is too high to rely on computers alone. Especially in these early days of autonomous vehicle development.
Road Friction & autonomous vehicles
Not only do self-driving cars need to deliver passengers to their destination in a safe manner, but they also need to be able to do so while also providing a comfortable and efficient journey. If taking a trip in an autonomous vehicle drastically increased the travel time, the desirability of this feature would drop for many users.
Understanding road friction becomes critically important in order to provide both a safe and efficient journey, this is especially true in challenging weather conditions such as snow and ice.
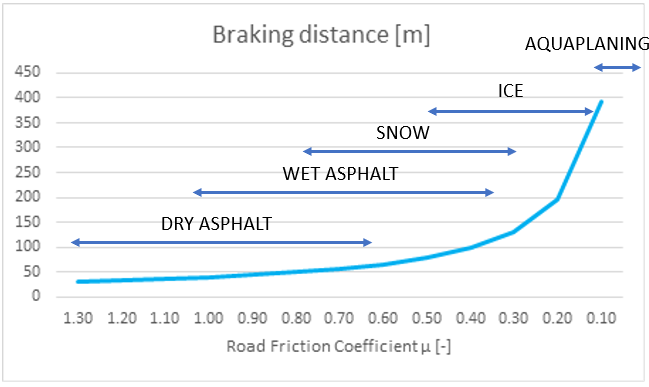
The picture above portrays how a decrease in road friction caused by various weather conditions can have a drastic effect on braking distance. Without an understanding of the road friction levels of upcoming road segments autonomous vehicles will not be able to adequately judge braking distances leading to either decreased safety or journey efficiency. Vehicles will need to take a safe approach and drive slower or brake sooner than would be necessary with the appropriate road friction data.

Data Collection
Accumulating this supervised training data is a key challenge for developing algorithms for more and more autonomous vehicles. Collection of this data normally requires outfitting special vehicles with sensors to measure and monitor their surroundings. The data is then manually labelled by people. Should a problem be detected at a later stage resulting in additional data collection needs the entire process needs to be restarted at great cost. These delays erode the competitiveness of companies competing to offer self-driving solutions to the market.
RoadCloud provides real-time, comprehensive, and hyper-local road quality and road weather data. By equipping commercial fleets of vehicles with our high-fidelity sensors, we are able to continuously collect high quality data on the state of the entire road network. Our optical sensors can distinguish between (black) ice, slush, snow, and pooled water in all lighting conditions.
Our high frequency data gathering (typically 100Hz), collects numerous data types which are beneficial in the development of machine learning algorithms. Data types include road condition, road state (optical sensor measurements), accelerations (6 DoF), wheel speeds, ambient temperature, ABS, ESC, ASR event data, time, position, and various other CAN-bus data types.
RoadCloud can speed up the development of vehicle safety and sustainability algorithms, ADAS and autonomous vehicles by offering annotated vehicle data from a large pool of vehicles which are already on the road today. With RoadCloud data, companies can bypass several stages in the data collection process as no new sensor installations are needed and data labelling is automated via RoadClouds artificial intelligence. Should the need arise for additional data we have the capability to remotely activate data collection from any of our vehicles currently on the road. Our vehicles currently scan over 70,000km of roads each day!
Data use cases:
– Develop road friction estimation algorithms with reference friction sensor data
– Simulate vehicle dynamics with real data stream from vehicles on the road
– Study tyre behaviour and tread wear from wheel speed signal
– Identify aquaplaning and developed estimator for it
– Evaluate roadway quality from Inertial Measurement Unit data
– Innovate: we can supply any message(s) from the CAN-bus for you!
Let’s make our data work for you! – contact us today.